德国Kuka和美国FANUC
Robotics公司研制的链式坐标构型重型负载视觉机器人,能举起上千公斤的重量,己在大型装配制造业得到应用。随着技术的不断进步,各种新型装配机器人层出不穷,并且随着电子显微技术的发展,微装配机器人将工作领域扩展到微米甚至纳米空间,如John等研制的微装配机器人,通过遥操作可以实现50-100微米大小的零件的抓取、移动和释放操作。
机器人摄像机标定
对摄像机的内部参数和外部参数进行求取的过程。视觉系统从摄像机获取的图像信息出发,计算三维环境中物体的位置、形状等几何信息,并由此重建三维物体。图像上每一点的位置与空间物体表面相应点的几何位置有关。这些位置的相互关系,由摄像机成像几何模型所决定,几何模型的参数称为摄像机参数,主要包括内参数和外参数。
咨询详情
其中内参数主要包括光轴中心点的图像坐标、成像平面坐标到图像坐标的放大系数、镜头畸变系数等。外参数是摄像机坐标系在参考坐标系中的表示。摄像机标定提供了非测量摄像机与专业摄像机之间的联系。而所谓非测量摄像机是指这样一类摄像机,其内部参数完全未知,部分未知或者原则上不确定。摄像机标定就是通过标定实验获得摄像机的内、外参数。
咨询详情
视觉控制的结构与算法

机器人视觉控制本质上是利用摄像机采集到的二维图像信息对机器人的运动进行控制,对视觉信息的不同利用会得到不同的控制效果。在笛卡儿空间构成的闭环控制系统,只能保证视觉测量出的目标在笛卡儿空间的位置和姿态达到期望值
咨询课程

由于摄像机的模型误差以及特征点的匹配误差导致视觉测量本身具有较大误差,再加上机器人的模型误差,所以目标在笛卡儿空间的实际位置和姿态与期望值之间有时候会有较大的误差,控制精度较低。
咨询课程
机器人视觉运动控制培训内容
1
讲解视觉传感器(如工业相机)的工作方式,包括图像采集、像素和分辨率的概念。例如,介绍面阵相机和线阵相机的不同成像原理,以及它们在不同场景下的应用优势。深入学习图像处理的基本算法,如滤波(高斯滤波、中值滤波等)用于去除图像噪声,边缘检测算法(Canny
边缘检测等)用于提取物体的轮廓特征。
2
介绍目标识别和定位的方法,包括基于特征的识别(如形状特征、纹理特征等)和基于深度学习的识别(如卷积神经网络在目标识别中的应用
3
教授机器人运动学基础,包括正运动学(已知机器人关节角度,计算末端执行器的位置和姿态)和逆运动学(已知末端执行器的目标位置和姿态,求解关节角度)。以六轴工业机器人为例,详细讲解如何通过运动学方程计算机械臂各个关节的运动。
4
讲解机器人的动力学原理,如力和扭矩在机器人运动中的作用,以及如何根据动力学模型来优化机器人的运动速度和加速度,避免机械臂的振动和过载。
5
阐述视觉信息如何转换为运动控制指令,例如视觉系统识别出目标物体的三维坐标后,如何通过坐标变换和运动规划算法,将其转换为机器人各关节的运动角度和速度指令。介绍视觉反馈控制的概念,即机器人在运动过程中如何根据视觉系统实时反馈的信息(如目标物体的位置变化)来调整运动轨迹,确保准确地完成任务。
培训方式

课堂教学
由专业的讲师进行理论知识的讲解,通过投影仪、电子白板等工具展示教学课件,包括原理示意图、算法公式、案例视频等。例如,在讲解机器人运动学原理时,讲师可以通过
3D 动画演示机器人关节运动与末端执行器位置变化的关系,帮助学员更好地理解抽象的理论知识。
咨询课程
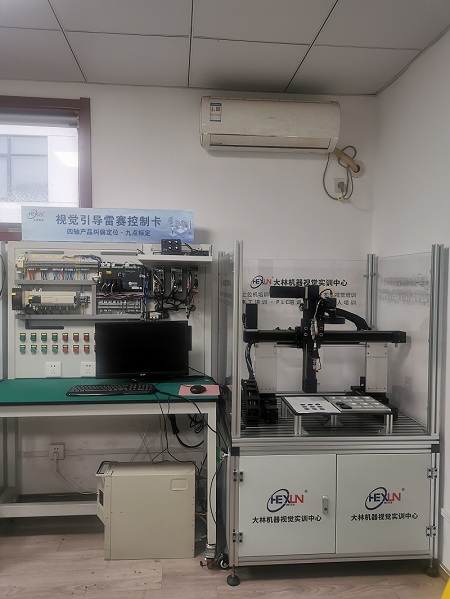
实验室实践
在配备了机器人、视觉传感器、计算机等设备的实验室中,学员在讲师的指导下进行实践操作。实验室可以提供各种实验工具和材料,如不同类型的机器人零件、测试用的物体样本等。例如,学员在实验室中可以亲手操作机器人,调整视觉参数,观察不同参数设置对视觉识别和运动控制效果的影响。
咨询课程
更多培训课程,学习资讯,课程优惠等学校信息,请进入苏州大林机器视觉实训中心网站详细了解,免费咨询电话:400-998-6158